ZJ转矩转速传感器安装于功率传动轴之间,它和TR型转矩转速功率测量仪及CZ型磁粉制动器(WZ型电涡流制动器)配合使用,可以测量各种发动机、电机、风机、压缩机、液压泵、齿轮箱等动力机械及传动机械在0-6000转/分范围内的转矩转速功率。其中ZJ是通过磁电变换输出具有相位差的二个电压讯号的传感器,TR型是带打印,显示的单片机式测量仪。CZ型磁粉(电涡流)制动器激磁电流产生大小可调的阻尼力矩,为成套测功的理想加载器,TR及CZ(WZ)具体使用请阅相关说明书。本公司提供交钥匙工程的成套测功系统。
二、工作原理:
ZJ转矩转速传感器主要由扭力轴、磁检测器,转筒及壳体等四部分组成。磁检测器包括配对的两组内、外齿轮,永久磁钢和感应线圈。外齿轮安装载扭力轴测量段的两端;内齿轮转筒内,和外齿轮相对,永久磁钢紧接内齿轮安装在转筒内。永久磁钢,内外齿轮构成环状闭合磁路,感应线圈固定在壳体的两端盖内。在驱动电机带动下,内齿轮随同转筒旋转。
内外齿轮是变位齿轮,并不齿合,齿顶六由工作气隙,内外齿轮的齿顶相对时气隙最窄,齿顶和齿槽相对时,气隙最宽。内外齿轮在相对旋转运动时,齿顶与齿槽交替相对,相对转动一个齿位时,工作气隙发生一个周期的变化,磁路的磁阻和磁通随之相应作周期变化,因此线圈中感应出近似正弦波的电压讯号,讯号电压瞬时值的变化和内外齿轮的相对位置的变化是一致的。
如果两组检测器的齿轮的投影互相重合时、两组电压讯号的相位差为零。安装时,两只内齿轮的投影是重合的。而扭力轴上的两只外齿轮是按错动半个齿安装的。因此,两个电压讯号具有半个周期的相位差,即初始相位差为α0=180°。若齿轮为120齿,分度角为3°,相位差为180°时,相应外齿轮错动1.5°。
当扭力轴受到扭矩作用时,产生扭角β,两只外齿轮的错位角变为1.5°±β两个电压讯号的相差角相应变为:α=120 ×(1.5°±β)=180°±120β。
扭角和扭矩是成正比例的,因此扭角的变化和扭矩成正比,即相位差角的变化△α=α-α0=±120β=120K1M=KM 式中K1为相位差角和扭矩的比例系数,K=±120K1,“±”另表示转动方向。
设扭力轴测量段的直径为d,长度为L,扭力轴材料的剪切弹性模为G,则K1=32L/πdG。 将传感器的两个电压讯号输入TR-1转矩转速功率测量仪,经过仪表将电压讯号进行放大、整形、检相、变换成计数脉冲,然后计数和显示,便可直接读出扭矩和转速的测量结果。
由于采用磁电转换、相位差原理和数字显示的转矩转速测量方法,因此能进行稳定、可靠、快速、灵敏的高精度测量。它具有如下特点:
1.可以测量静扭矩
当把扭矩臂固定于扭力轴的一端,锁定另一端时,这时只要打开传感器的驱动电机,就可得到输出信号,并能很方便地对传感器进行静态校准。当然,已经过静校的传感器就能对静扭矩和低速下的扭矩进行精密测量了。
2.不用滑环
扭矩测量是由非接触式磁电检测器的输出信号来实现的,所以本仪器可以测量其它仪器不可能测量到的高速转矩。
3.精度高,稳定性好
由于扭力轴是由具有优良的弹性,滞后效应极小的高级合金材料制成,所以灵敏度高,残余变形小,读数稳定、可靠。
4.操作简单、方便
该仪器和TR-1相配合,可自动测量并直接读出扭矩、转速功率,设置数据存储后每次开机即可直接测量。
三、ZJ转矩转速传感器主要技术参数:
1、传感器适用于环境温度0-55℃,以及相对温度不超过90%的条件下工作。
2、传感器适用的转速范围及联轴节重量(见下表):
| 型 号 |
额定转矩(N・M) |
转速范围(转/分) |
单只连轴节重量(<=kg) |
ZJ-0.1
-0.2 |
12 |
0-4000
0-4000 |
0.3
0.3 |
|
ZJ-0.5
-1
-2 |
5
10
20 |
0-6000
0-6000
0-6000 |
0.5
0.5
0.5 |
ZJ-5
-10
-20 |
50
100
200 |
0-4000
0-4000
0-4000 |
1.5
2
5 |
ZJ-50
-100
-200 |
500
1000
2000 |
0-3000
0-3000
0-3000 |
10
15
20 |
ZJ-500
-1000
-2000 |
5000
10000
20000 |
0-2000
0-2000
0-2000 |
25
30
35 |
3、传感器所需联轴节、垫块、测试平板等根据用户需求,可代为加工。
4、系统总误差:
(1)静标精度:在标定传感器系数的相同环境温度下(不相同时按温度系数修正),静标定误差应不超过±0.2%。
(2)在额定转速范围内,套筒固定在任意位置时,不同转速下扭矩测量读数变化应不大于±0.2%。
(3)传感器转轴转动,中间套筒在不同位置时,读数误差应不超过±0.2%;或者中间套筒转动(启动驱动电机),轴在不同位置时,读数误差应不超过±0.2%。
5、测量精度:传感器与TR-1配合,其测量误差不超过±0.5%。
6、允许测量的最大扭矩:120%额定值。
7、输出电压信号幅度:不小于0.7V有效值。
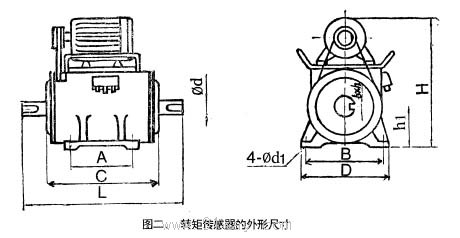
8、外形尺寸见图二。
9、工作时间:可连续运行。

| |
A |
C |
L |
h1 |
B |
D |
H |
d1 |
|
b |
h |
d |
| ZJ-0.1,0.2 |
110 |
200 |
260 |
90 |
150 |
180 |
300 |
11 |
120 |
4 |
2.5 |
12 |
| ZJ-0.5,1,2 |
110 |
200 |
260 |
90 |
150 |
180 |
300 |
11 |
120 |
4 |
2.5 |
12 |
| ZJ-5,10,20 |
172 |
260 |
370 |
100 |
182 |
210 |
320 |
12 |
120 |
8 |
4.0 |
26 |
| ZJ-50,100,200 |
170 |
300 |
430 |
110 |
200 |
230 |
345 |
16 |
120 |
花键 |
8-48×42×8 |
| ZJ-500,1000,2000 |
224 |
400 |
660 |
120 |
230 |
262 |
390 |
18 |
120 |
10-100×90×14 |
1、传感器必须安装牢靠,以防工作时震动。
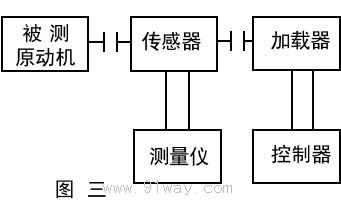
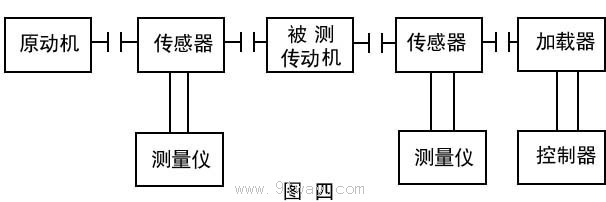
2、传感器安装位置如图三、图四所示。


3、传感器的安装同心度应不大于0.1mm,否则,仪器的测量精度不易保证。
4、传感器负载侧的联轴节应能方便地脱开,以便零点调整。
5、由于传感器的转速信号是轴的转速与传感器套筒转速的代数和,所以当传感器上的驱动电机打开
时,扭力轴转速应等于仪表转速读数减去传感器电机转速所得得差值。
6、传感器在使用时应力求避免震动。
7、环境温度的变化会直接影响仪器的测量精度,当测量精度要求不高时,相对于传感器标定温度时
温差在±10℃时,对标定系数可不作修改,如果环境温度超过这一范围,就须对传感器所标定的系数
值进行修正,即将TR-1系数修正后使用,才能保证器测试精度,温度系数的修正按下式计算:
Xt=Xto[1+εG(t-to)]
式中:Xt---温度为t时的传感器系数。
Xto----温度为to时所标定的传感器系数(即铭牌上的传感器温度系数)。
t-----测量时的实际环境温度℃。
to----标定传感器系数时的环境温度℃。
εG----剪切弹性模量G的温度系数,其值在这里取为--0.027%。
例如:传感器出厂时的标定系数为7215是在10℃下进行标定的,现在为36℃的情况下是用,其修正
系数为:Xt=7215×(1-0.027%×26℃)=7164
即将传感器的标定系数修正为7164,并在使用时将TR-1的系数置于7164,若环境温度仍为10℃,则
系数仍为7215。
8、操作步骤:
(1)将传感器与被测功率传动轴及负载框图顺序及上述1-4条安装连接牢靠。
(2)将信号输出线对应接至TR-1,并按传感器铭牌上标明的系数值设定TR-1的标定系数。
(3)脱开负载侧联轴节,开动被测机械,调节TR-1的零点,如因转速过低,输出电压信号的幅度低
于0.7V时,可开动传感器上的驱动电机,并使其旋转方向和测量轴的旋转方向相反,但这时的转速
按第5条取得。
(4)联接好联轴节,则可进行测量。
9、维护要求:
(1)传感器装配出厂前经过精心调试与补偿,切不可随便拆装,以免失去精度。
(2)传感器经使用一段时间后,如需进行检定、维护,请返回本厂重新进行标定。
(3)传感器应避免在剧烈震动和高温潮湿环境中使用和保管。
(4)传感器的包装运输应根据《精密仪器包装运输办法》施行。